









描述说明
纠错
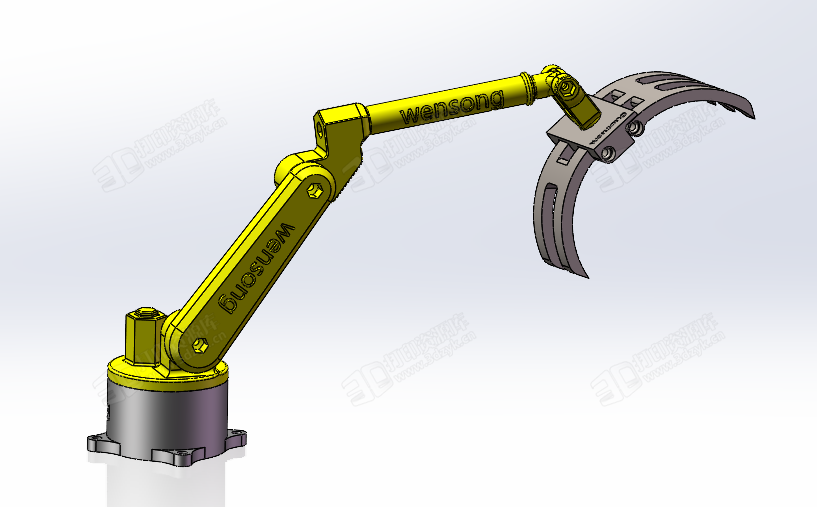
机器人每个关节之间,全部使用的是M3的螺丝,在机器人底座中心位置,预留了一块强磁位置,强磁尺寸直径10mm*厚度5mm。可以吸附到含铁的位置,也起到配重的作用。
底座和一轴的装饰马达位置,为了节约耗材做成了空心的。
M3螺丝杆数量:
长度20*数量5个
长度14*数量1个
长度45*数量2个
M3螺母数量:8个,建议使用防松螺母。
底座强磁:直径10*厚度5
本模型所属分类为 "机器零件 » 机器整机",模型主题为机器人模型-抓手,模型ID:20285,本素材由设计师:wensong 在2022-06-23上传。
底座和一轴的装饰马达位置,为了节约耗材做成了空心的。
M3螺丝杆数量:
长度20*数量5个
长度14*数量1个
长度45*数量2个
M3螺母数量:8个,建议使用防松螺母。
底座强磁:直径10*厚度5
标签:
相关推荐
-
蜂窝笔筒
-
花瓶
-
鸟巢
-
卡片式一体打印成型折叠手机支架
-
时钟教学模型



成为第一个评论的人



推荐课程